I added an MCP6002 op amp to The circuit to amplify the signal coming from the body contact on the tentacles. This worked well on the bread board but on the circuit I was getting the following results with lots of zeros it didn’t seem that stable.
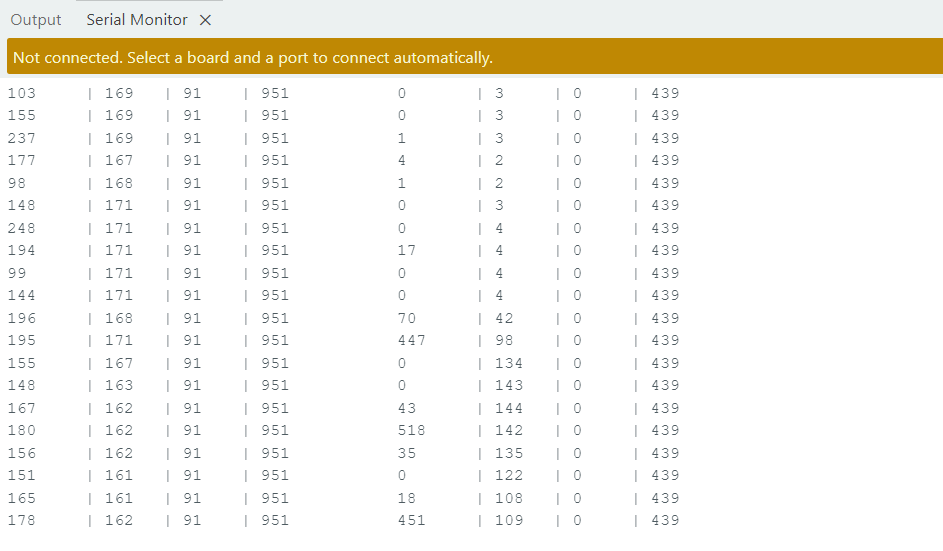
However on checking my circuit I realised that I put a capacitor on the MCP6002 on the incorrect pin. This capacitor was supposed to help avoid noise on the signal. Once I put it in the correct place, I got a steady signal..
Using this amplified signal allows for a much better range when performing with the tentacles. However, I’m still having some issues with the tentacle responsible for loop length. It seems to change over time. More investigations are necessary
One idea is that I could have a calibration button. This would need to be placed somewhere where it could not accidentally be activated. Alternatively, I could have the instrument auto calibrate every five minutes or so however this may also be quite disruptive.One idea is that I could have a calibration button. This would need to be placed somewhere where it could not accidentally be activated. Alternatively, I could have the instrument auto calibrate every five minutes or so however this may also be quite Disruptive.Disruptive.
The tentacles currently have conductive thread that is machine sewn. It is not a lot of thread and I am going to experiment with hand sewing extra thread to see how that affects the input.